UML&OCL Modeling Languages
Practice (2b)
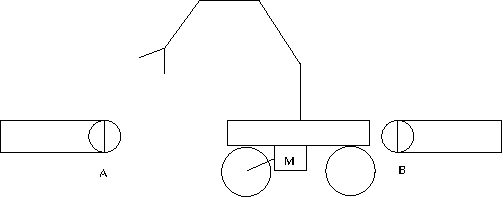
- Represent the behavior of a robot that has to move element between two location A<->B.
This one is composed with: a motor that can turn in left or right direction or to be stopped, an arm that can take or release an element. The displacement from A to B takes 30sec and the take/release of an element 3sec. The robot also has a sensor to detect in front presence, and an alarm activated in this latter case.
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL
thiry laurent ensisa uha alsace mulhouse france unified modeling modelisation language constraint object objet UML OCL